В поисках внеземной жизни: для чего нужны подводные роботы NASA?
В поисках внеземной жизни Национальное управление США по аэронавтике и исследованию космического пространства (NASA) активно разрабатывает технологии, способные действовать в экстремальных условиях. Одним из наиболее перспективных проектов стал SWIM (Sensing With Independent Micro-swimmers), в рамках которого создается рой автономных подводных микропловцов. Это миниатюрные устройства, оснащенные инновационными системами, способные исследовать недоступные водные среды и искать потенциальные признаки жизни. Рассказываем, что о них известно и когда ждать реализации проекта.
Что из себя представляют роботы NASA?
Основная цель SWIM — изучение условий, которые могут поддерживать жизнь за пределами Земли. Роботы должны будут исследовать подледный океан Европы, спутника Юпитера, который, как предполагается, содержит воды больше, чем во всех океанах Земли. Дело в том, что вода служит ключевым фактором для существования организмов. Именно эта скрытая среда делает Европу одним из самых перспективных объектов для поиска внеземной жизни.
По задумке разработчиков, роботы SWIM размером с мобильный телефон проникнут в эти воды с помощью криобота, способного плавить лед. Оснащенные беспроводной акустической системой связи, эти подводные устройства смогут обмениваться данными и координировать действия внутри роя. Несмотря на компактные размеры, они способны исследовать до 86 тыс. куб. м воды. После проникновения под лед рой из нескольких десятков таких аппаратов начнет автономное изучение окружающей среды.
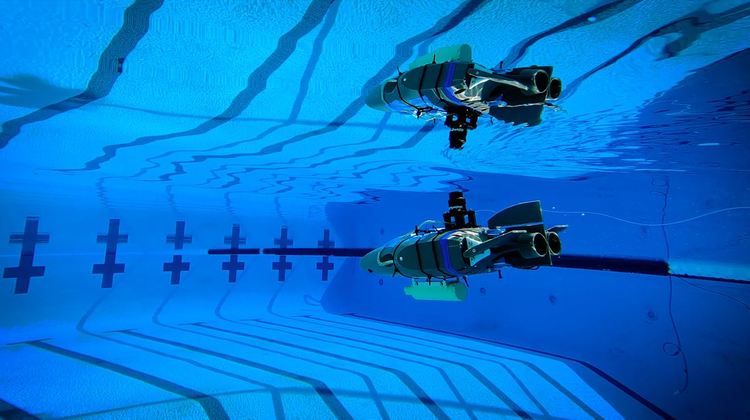
Прототипы SWIM уже прошли начальные тестовые запуски в бассейне Калтеха и на базе Лаборатории реактивного движения NASA (JPL). Испытания показали их способность выполнять сложные маневры, такие как движение по заданным траекториям и реагирование на сигналы окружающей среды. Один из прототипов даже «написал» в воде аббревиатуру JPL, демонстрируя точность управления. Прототипы длиной около 42 см использовались для проверки маневренности и управления, однако будущие версии будут уменьшены до 12 см. Это обеспечит возможность создания роя из множества таких роботов для исследования больших площадей.
Цифровые модели роботов были протестированы и в компьютерных симуляциях, воспроизводящих условия поверхности Европы. Эти испытания помогли разработать алгоритмы, оптимизирующие работу роя в экстремальной среде.
Для чего нужны эти роботы?
Хотя проект SWIM разрабатывается для миссий к ледяным лунам, его технологии найдут применение и на Земле. Эти роботы пригодятся для:
- океанографических исследований;
- изучения вод в полярных регионах;
- мониторинга химического состава воды.
Кроме того, SWIM может стать основой для других космических миссий, связанных с исследованием водных систем, где автономная робототехника необходима для работы в условиях ограниченного взаимодействия с Землей.
Попав в жидкую среду, устройства займутся поиском химических и температурных сигналов, потенциально указывающих на присутствие жизни. Они смогут измерять температуру, давление, кислотность, щелочность, проводимость и химический состав воды. Благодаря миниатюрным датчикам, объединяющим несколько функций, такие устройства могут сыграть значимую роль в изучении труднодоступных водных сред.
Когда состоится первая полноценная миссия роботов?
Первая полноценная миссия подводных роботов NASA пока находится в стадии разработки и подготовки. Ее запуск ожидается не ранее, чем через несколько лет. Сейчас инженеры активно тестируют прототипы роботов как в реальных водных условиях, так и с помощью компьютерных симуляций.
Важным этапом станет миссия Europa Clipper, которая планируется на 2030 год. Этот аппарат будет исследовать поверхность Европы и ее подповерхностные слои в течение четырех лет, чтобы подтвердить наличие океана и оценить его потенциал для поддержания жизни. Лишь после завершения этой миссии можно будет приступить к внедрению подводных роботов для детального изучения подледных вод.
Безусловно, концепция SWIM требует еще нескольких лет разработки, но уже сейчас испытания показывают ее огромный потенциал. В будущем планируется повысить энергоэффективность, увеличить время работы батарей и улучшить алгоритмы автономной навигации.